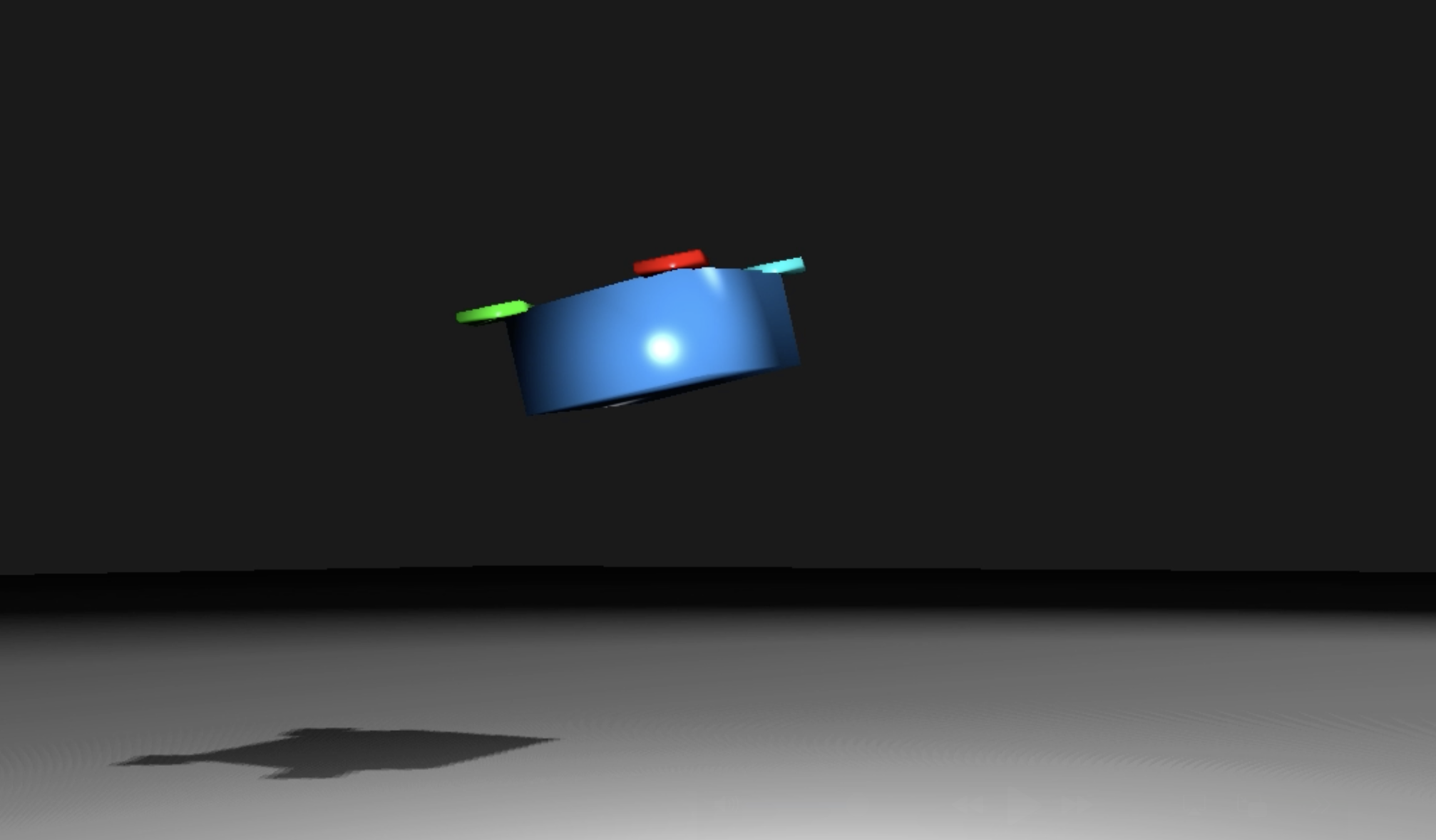
Drone Sim
Drone simulation in C++ with Bullet physics and OpenGL rendering, integrating Ada/Python flight control and simulated sensor data.
Drone simulation in C++ with Bullet physics and OpenGL rendering, integrating Ada/Python flight control and simulated sensor data.
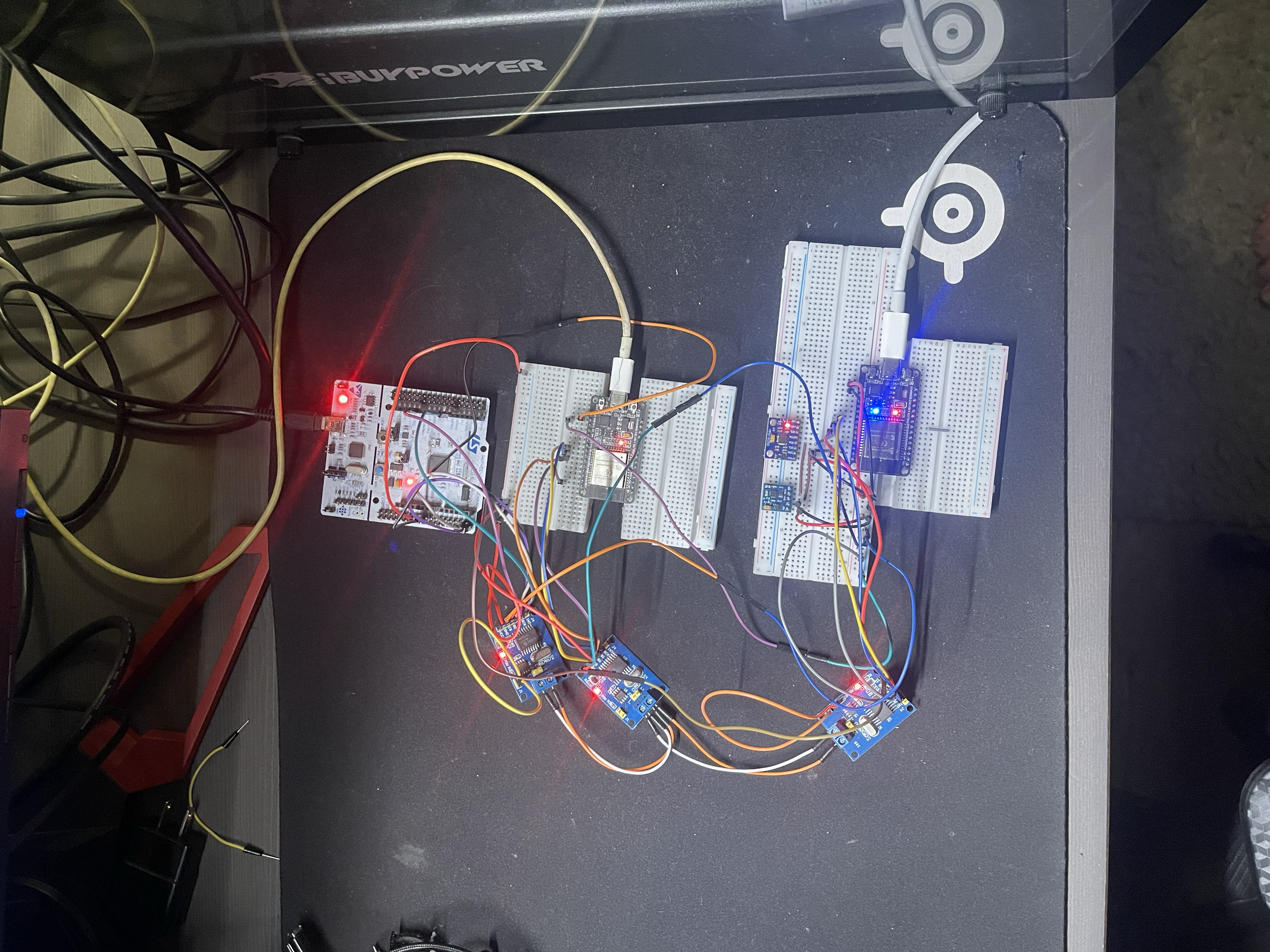
Distributed CAN bus network using Rust (Embassy) on ESP32 nodes and C++ (FreeRTOS) on STM32
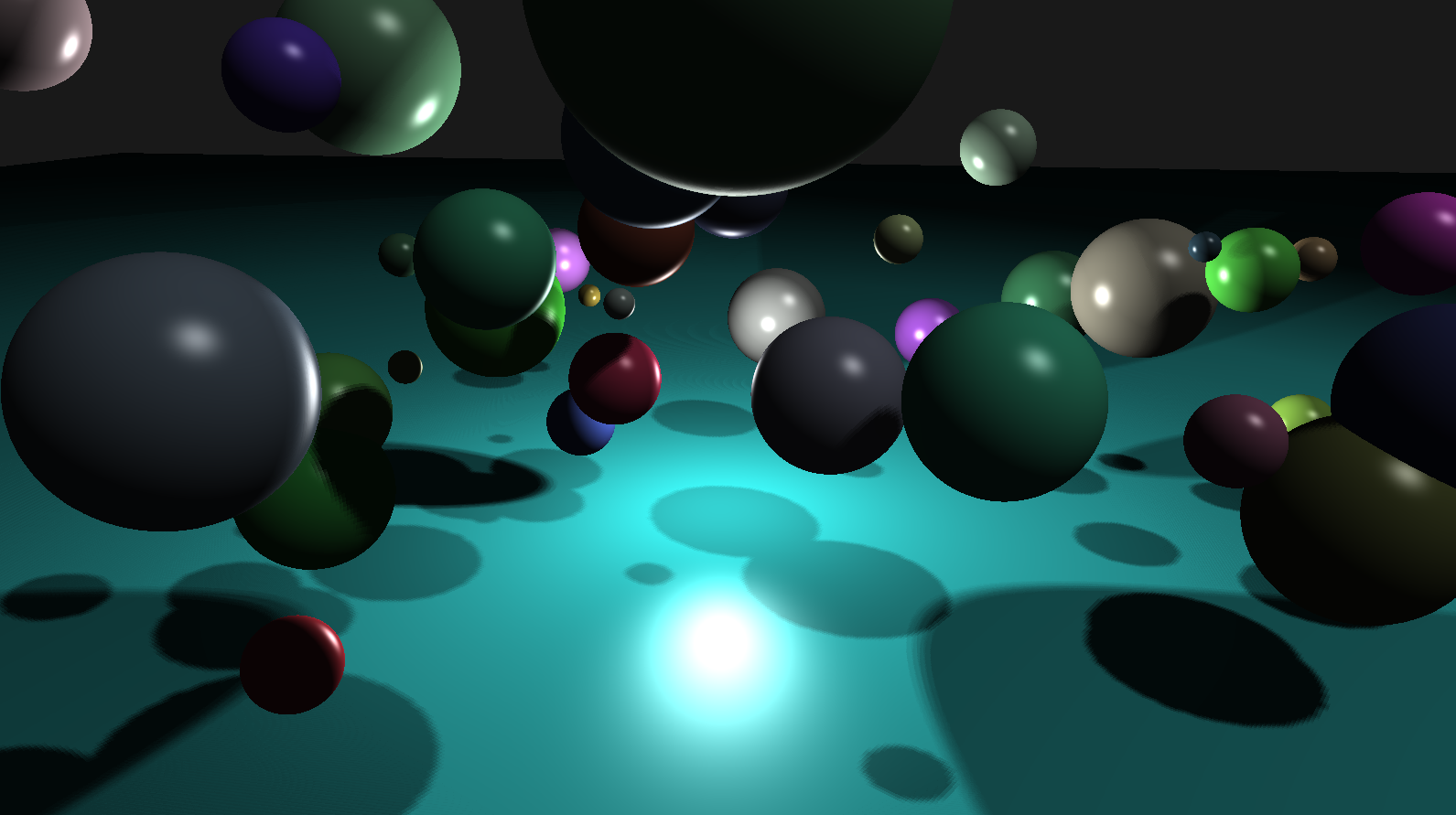
An ECS-Based OpenGL Renderer with Shadow Mapping written in C++
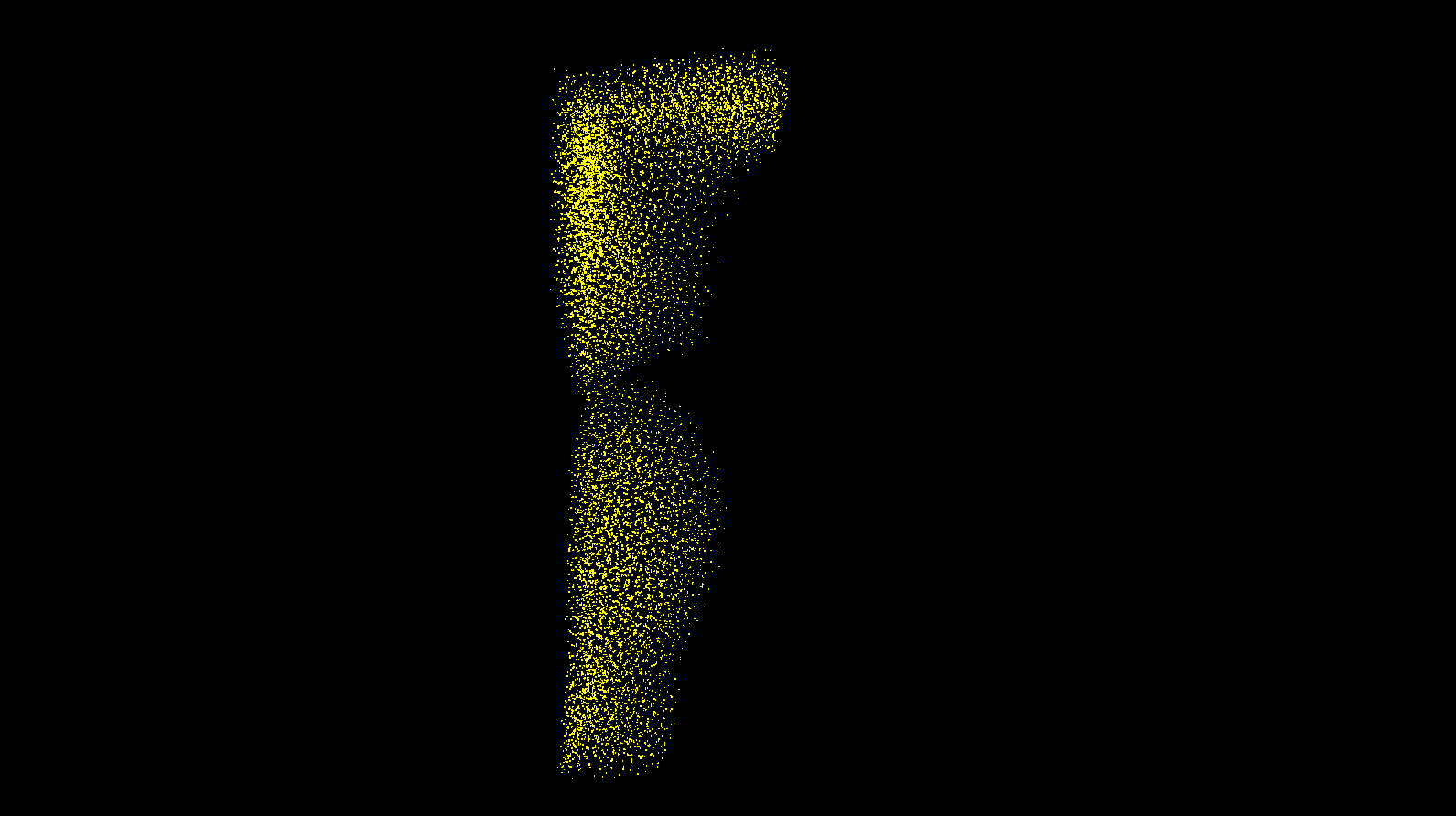
Accelerating Boid Simulations with CUDA and C++, Rendered with OpenGL